1. 将initial过程块改造为task
task和function用法见[[SystemVerilog学习笔记(四)]]
1.1改造
将前一次的两个initial begin end 语句封装进task任务中
initial begin : drive_reset_proc
drive_reset();//调用task
end
task drive_reset();
……//将复位信号的产生语句封装进task
endtaskinitial begin : drive_chnl0_proc
drive_chnl0();//调用task
end
task drive_chnl0();
……//将drive_chnl0语句封装进task
endtask
1.2改造后的tb.sv
tb.sv代码如下
//********************************** stimulator **********************************//
module rt_stimulator(
input clock
,input reset_n
,output logic [15:0] din
,output logic [15:0] frame_n
,output logic [15:0] valid_n
,input [15:0] dout
,input [15:0] valido_n
,input [15:0] busy_n
,input [15:0] frameo_n
);
//for debug purpose from waveform //定义检测状态的变量
typedef enum {DRV_RESET,DRV_IDLE,DRV_ADDR,DRV_PAD,DRV_DATA} drv_state_t;
drv_state_t dbg_state;
byte unsigned dbg_din_chnl0_data;
initial begin : drive_reset_proc //reset阶段,复位时,reset_n为低电平,frame_n和valid_n为高电平
drive_reset();
end
task drive_reset();
@(negedge reset_n);
dbg_state <= DRV_RESET;
din <= 0;
frame_n <= 1;
valid_n <= 1;
endtask
// drive chaannel 0 - chanel 15 (din[15:0])定义数据输出地址及数据
bit [3:0] addr;
byte unsigned data[];
initial begin : drive_chnl0_proc
drive_chnl0();
end
task drive_chnl0();
@(negedge reset_n);
repeat(10) @(posedge clock);//延迟10个时钟周期
addr = 3; //从第3位输出
data = '{8'h33,8'h77};
// drive address phase 输入地址位阶段
for(int i=0;i<4;i++)begin //4 clock
@(posedge clock);
dbg_state <=DRV_ADDR;
din[0] <= addr[i];
valid_n[0] <= $urandom_range(0,1); //valid_n在din的地址输入时间段可为任意值x
frame_n[0] <= 1'b0; //frame_n需要为低
end
// drive pad phase //隔离阶段
for (int i=0;i<5;i++)begin //5 clock
@(posedge clock);
dbg_state <=DRV_PAD;
din[0] <= 1'b1;
valid_n[0] <= 1'b1; //valid_n需为高电平
frame_n[0] <= 1'b0; //frame_n需为低电平
end
// drive data phase 传输数据阶段
foreach(data[id])begin
for(int i=0;i<8;i++)begin
@(posedge clock);
dbg_state <=DRV_DATA;
dbg_din_chnl0_data <= data[id];
din[0] <= data[id][i];
valid_n[0] <=1'b0;
frame_n <= (id == data.size()-1 && i == 7) ? 1'b1 : 1'b0;//packet最后一位输出数据时frameo_n为高
end
end
// drive idle phase 闲置(没有数据传输)阶段
@(posedge clock);
dbg_state <=DRV_IDLE;
dbg_din_chnl0_data <= 0;
din[0] <= 1'b0;
valid_n[0] <= 1'b1;
frame_n <= 1'b1;
endtask
endmodule
//********************************** tb **********************************//
module tb;
bit clk,rstn;
logic [15:0] din, frame_n, valid_n;
logic [15:0] dout, valido_n, busy_n, frameo_n;
// 产生时钟,周期为10ns
initial
forever #5ns clk <= !clk;
// 产生复位信号
initial begin
#2ns rstn <= 1;
#10ns rstn <= 0;
#10ns rstn <= 1;
end
//例化router为DUT
router dut(
.reset_n(rstn),
.clock(clk),
.* //其余端口名称均相同
);
//例化stimulator
rt_stimulator stim(
.reset_n(rstn),
.clock(clk),
.*
);
endmodule 1.3仿真结果

2. 任意source_channl向任意destination_channl发送数据
2.1改造
task drive_chnl0(bit[3:0] saddr, bit [3:0] daddr, byte unsigned data[]);
……
endtask
2.2改造后的tb.sv
//********************************** stimulator **********************************//
module rt_stimulator(
input clock
,input reset_n
,output logic [15:0] din
,output logic [15:0] frame_n
,output logic [15:0] valid_n
,input [15:0] dout
,input [15:0] valido_n
,input [15:0] busy_n
,input [15:0] frameo_n
);
//for debug purpose from waveform //定义检测状态的变量
typedef enum {DRV_RESET,DRV_IDLE,DRV_ADDR,DRV_PAD,DRV_DATA} drv_state_t;
drv_state_t dbg_state;
byte unsigned dbg_din_chnl0_data;
//reset阶段,复位时,reset_n为低电平,frame_n和valid_n为高电平
initial begin : drive_reset_proc
drive_reset();
end
task drive_reset();
@(negedge reset_n);
dbg_state <= DRV_RESET;
din <= 0;
frame_n <= '1;//等效16'hFFFF
valid_n <= '1;
endtask
// drive chaannel 0 - chanel 15 (din[15:0])定义数据输出地址及数据
bit [3:0] daddr;
byte unsigned data[];
initial begin : drive_chnl0_proc
@(negedge reset_n);
repeat(10) @(posedge clock);//延迟10个时钟周期
drive_chnl(0,3,'{8'h33,8'h77});//name mapping
drive_chnl(0,5,'{8'h55,8'h66});//name mapping
end
initial begin : drive_chnl3_proc
@(negedge reset_n);
repeat(10) @(posedge clock);//延迟10个时钟周期
drive_chnl(3,6,'{8'h77,8'h88,8'h22});//name mapping
end
task drive_chnl(bit[3:0] saddr, bit [3:0] daddr, byte unsigned data[]);
$display("[DRV]src_chnl[%0d],dest_chnl[%0d] data trans started",saddr,daddr);
// drive address phase 输入地址位阶段
for(int i=0;i<4;i++)begin //4 clock
@(posedge clock);
dbg_state <=DRV_ADDR;
din[saddr] <= daddr[i];
valid_n[saddr] <= $urandom_range(0,1); //valid_n在din的地址输入时间段可为任意值x
frame_n[saddr] <= 1'b0; //frame_n需要为低
end
// drive pad phase //隔离阶段
for (int i=0;i<5;i++)begin //5 clock
@(posedge clock);
dbg_state <=DRV_PAD;
din[saddr] <= 1'b1;
valid_n[saddr] <= 1'b1; //valid_n需为高电平
frame_n[saddr] <= 1'b0; //frame_n需为低电平
end
// drive data phase 传输数据阶段
foreach(data[id])begin
for(int i=0;i<8;i++)begin
@(posedge clock);
dbg_state <=DRV_DATA;
dbg_din_chnl0_data <= data[id];
din[saddr] <= data[id][i];
valid_n[saddr] <=1'b0;
frame_n[saddr] <= (id == data.size()-1 && i == 7) ? 1'b1 : 1'b0;//packet最后一位输出数据时frameo_n为高
end
end
// drive idle phase 闲置(没有数据传输)阶段
@(posedge clock);
dbg_state <=DRV_IDLE;
dbg_din_chnl0_data <= 0;
din[saddr] <= 1'b0;
valid_n[saddr] <= 1'b1;
frame_n[saddr] <= 1'b1;
$display("[DRV]src_chnl[%0d],dest_chnl[%0d] data trans finished",saddr,daddr);
endtask
endmodule
//********************************** tb **********************************//
module tb;
bit clk,rstn;
logic [15:0] din, frame_n, valid_n;
logic [15:0] dout, valido_n, busy_n, frameo_n;
// 产生时钟,周期为10ns
initial
forever #5ns clk <= !clk;
// 产生复位信号
initial begin
#2ns rstn <= 1;
#10ns rstn <= 0;
#10ns rstn <= 1;
end
//例化router为DUT
router dut(
.reset_n(rstn),
.clock(clk),
.* //其余端口名称均相同
);
//例化stimulator
rt_stimulator stim(
.reset_n(rstn),
.clock(clk),
.*
);
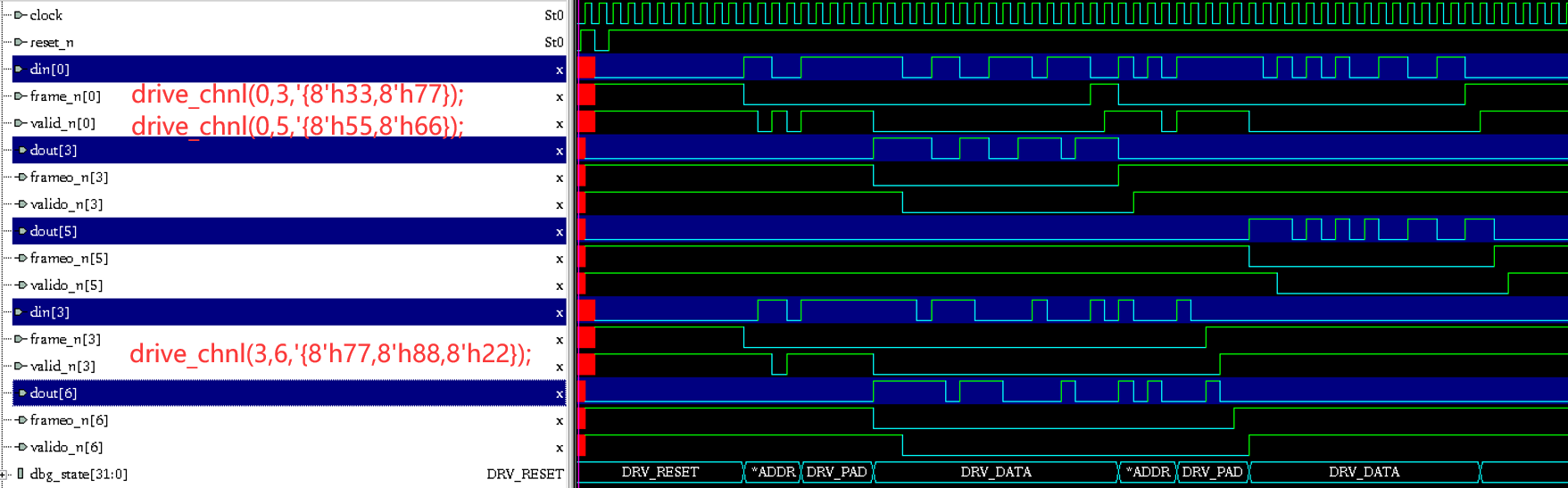
endmodule 2.3仿真结果

3. 关于automatic的问题
3.1给任务添加automatic
Module里面所有变量默认是静态变量,都是被共用的。
task不加automatic,任务task及其内部参数daddr,saddr等都是静态的,这个任务会被多个并行的线程所共享。当两个initial 同时调用drive_chnl这个task时,它们是共用这个task。
task添加automatic后,每次调用这个task时,都会单独开辟空间(包括内存及其内部参数都会有独立空间)。当两个initial 同时调用drive_chnl这个task时,它们独立调用task。
task automatic drive_chnl(bit[3:0] saddr, bit [3:0] daddr, byte unsigned data[]);
3.2添加automatic后的tb.sv
//********************************** stimulator **********************************//
module rt_stimulator(
input clock
,input reset_n
,output logic [15:0] din
,output logic [15:0] frame_n
,output logic [15:0] valid_n
,input [15:0] dout
,input [15:0] valido_n
,input [15:0] busy_n
,input [15:0] frameo_n
);
//for debug purpose from waveform //定义检测状态的变量
typedef enum {DRV_RESET,DRV_IDLE,DRV_ADDR,DRV_PAD,DRV_DATA} drv_state_t;
drv_state_t dbg_state;
byte unsigned dbg_din_chnl0_data;
//reset阶段,复位时,reset_n为低电平,frame_n和valid_n为高电平
initial begin : drive_reset_proc
drive_reset();
end
task drive_reset();
@(negedge reset_n);
dbg_state <= DRV_RESET;
din <= 0;
frame_n <= '1;//等效16'hFFFF
valid_n <= '1;
endtask
// drive chaannel 0 - chanel 15 (din[15:0])定义数据输出地址及数据
bit [3:0] daddr;
byte unsigned data[];
initial begin : drive_chnl0_proc
@(negedge reset_n);
repeat(10) @(posedge clock);//延迟10个时钟周期
drive_chnl(0,3,'{8'h33,8'h77});//name mapping
drive_chnl(0,5,'{8'h55,8'h66});//name mapping
end
initial begin : drive_chnl3_proc
@(negedge reset_n);
repeat(10) @(posedge clock);//延迟10个时钟周期
drive_chnl(3,6,'{8'h77,8'h88,8'h22});//name mapping
end
task automatic drive_chnl(bit[3:0] saddr, bit [3:0] daddr, byte unsigned data[]);
$display("[DRV]src_chnl[%0d],dest_chnl[%0d] data trans started",saddr,daddr);
// drive address phase 输入地址位阶段
for(int i=0;i<4;i++)begin //4 clock
@(posedge clock);
dbg_state <=DRV_ADDR;
din[saddr] <= daddr[i];
valid_n[saddr] <= $urandom_range(0,1); //valid_n在din的地址输入时间段可为任意值x
frame_n[saddr] <= 1'b0; //frame_n需要为低
end
// drive pad phase //隔离阶段
for (int i=0;i<5;i++)begin //5 clock
@(posedge clock);
dbg_state <=DRV_PAD;
din[saddr] <= 1'b1;
valid_n[saddr] <= 1'b1; //valid_n需为高电平
frame_n[saddr] <= 1'b0; //frame_n需为低电平
end
// drive data phase 传输数据阶段
foreach(data[id])begin
for(int i=0;i<8;i++)begin
@(posedge clock);
dbg_state <=DRV_DATA;
dbg_din_chnl0_data <= data[id];
din[saddr] <= data[id][i];
valid_n[saddr] <=1'b0;
frame_n[saddr] <= (id == data.size()-1 && i == 7) ? 1'b1 : 1'b0;//packet最后一位输出数据时frameo_n为高
end
end
// drive idle phase 闲置(没有数据传输)阶段
@(posedge clock);
dbg_state <=DRV_IDLE;
dbg_din_chnl0_data <= 0;
din[saddr] <= 1'b0;
valid_n[saddr] <= 1'b1;
frame_n[saddr] <= 1'b1;
$display("[DRV]src_chnl[%0d],dest_chnl[%0d] data trans finished",saddr,daddr);
endtask
endmodule
//********************************** tb **********************************//
module tb;
bit clk,rstn;
logic [15:0] din, frame_n, valid_n;
logic [15:0] dout, valido_n, busy_n, frameo_n;
// 产生时钟,周期为10ns
initial
forever #5ns clk <= !clk;
// 产生复位信号
initial begin
#2ns rstn <= 1;
#10ns rstn <= 0;
#10ns rstn <= 1;
end
//例化router为DUT
router dut(
.reset_n(rstn),
.clock(clk),
.* //其余端口名称均相同
);
//例化stimulator
rt_stimulator stim(
.reset_n(rstn),
.clock(clk),
.*
);
endmodule 3.3仿真结果
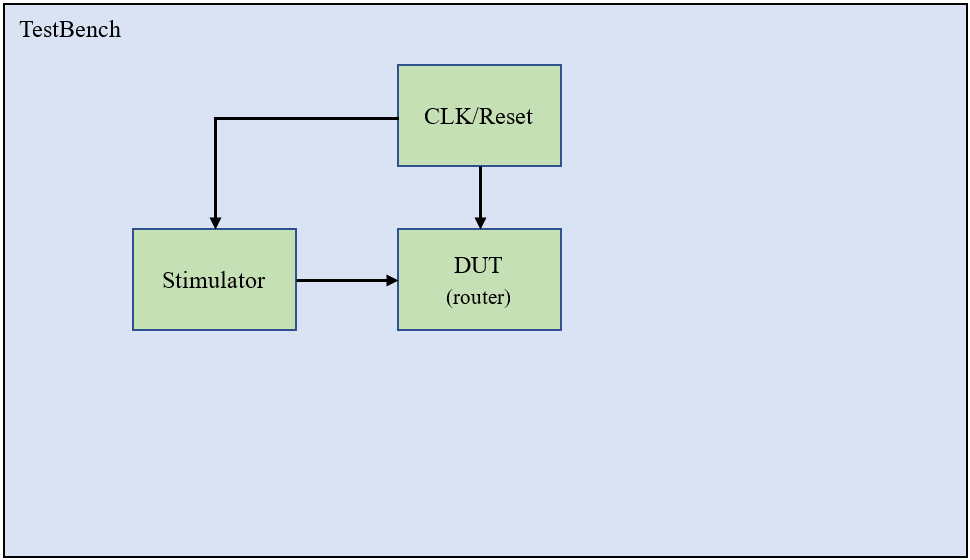
4. 初步TestBench平台概览